式中,m、n分别是面阵CCD,上的行、列光敏元标号;a、b 分别是面阵CCD, 上行列光敏元间隔尺寸。考虑到光学成像系统的放大率β ,实际图形边界的坐标为:
式中S为图形总面积;为描绘图形边界曲线轨迹时所经历的面阵CCD像素总数。其中 的符号判定条件为:
的符号判定条件为:

3 测绘系统的组成
测绘系统主要由激光光学系统、图像探测数据采集及数据处理系统三部分组成,如图3所示。
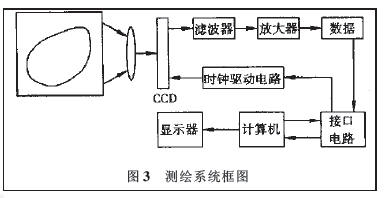
进行测绘时,首先用光纤探头在待测面上沿着图形边界移动,光学成像系统将探头的光点成像到面阵CCD上,面阵CCD实时记录下包含激光光纤探笔轨迹的一幅图像,经处理变成二值化数字图像,送入计算机中,同时还可以在输出显示屏上描绘出光点的轨迹。光纤探笔沿着待测图形边界移动一周后,系统即后可实时绘制出其图形并计算出它的面积。
激光光学系统由He-Ne激光器、光纤探笔和成像透镜组成。光纤探笔是以He-Ne激光器作为光源,笔筒内有多模光纤束,笔筒前端装有会聚透镜,并开有φ0.5mm的口,可形成φ0.5mm的照明光斑。测量时He-Ne激光器发出的6328A的红光经耦合进入光纤束,使光纤探头形成一个明亮的光点,可照亮待绘制点。成像透镜由照相机镜头组成,将探头光斑和整个被探测面成像到面阵CCD上,照相机镜头的放大率为1/50,并采用严格的消像差措施,使探头光斑在面阵CCD上的像点尺寸在10φm左右。
图像探测和数据采集系统使用2048×596, 面阵CCD作为探测器,在采样过程中,驱动电路的时钟频率为2MHz,即面阵CCD单个像素输出周期为500ns,在进行CCD像素数据采集的同时进行数据处理,将帧存贮器中的数据送入计算机,判定相应像素的坐标位置,在屏幕上绘制出边界的轨迹并计算出轨迹曲线的面积。
4 结语
用激光照明然后用面阵CCD记录图形的方法可以提高非标准化的不规则二维图形的绘制效率及精度,且省时省力, 将该方法获得的图形转化为类似AutoCAD等机械设计软件可识别的图形格式,可大幅度提高钣金设计的效率。








